
This Section describes a general setup for multi-rotor simulations.
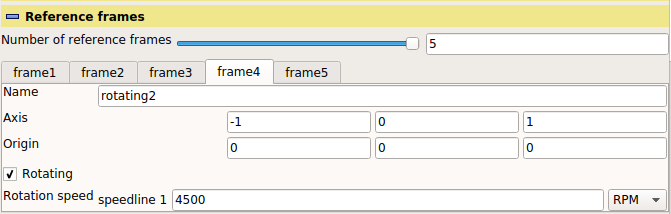
Each frame holds information about axis of rotation and revolution speed. Each frame can be defined either as rotating or stationary.These frames are afterwards used in `Components” section for setting rotation of individual components or boundary parts of the geometry.
The “Reference frames” section is depicted in Figure ![]() .
.